Stair climbing robot using aurdino chip
INTRODUCTION :
This Project is for course"Advance Material Prototyping And Die Design" to Develop a stair climbig robot using aurdino chip.
Basic Sketch :
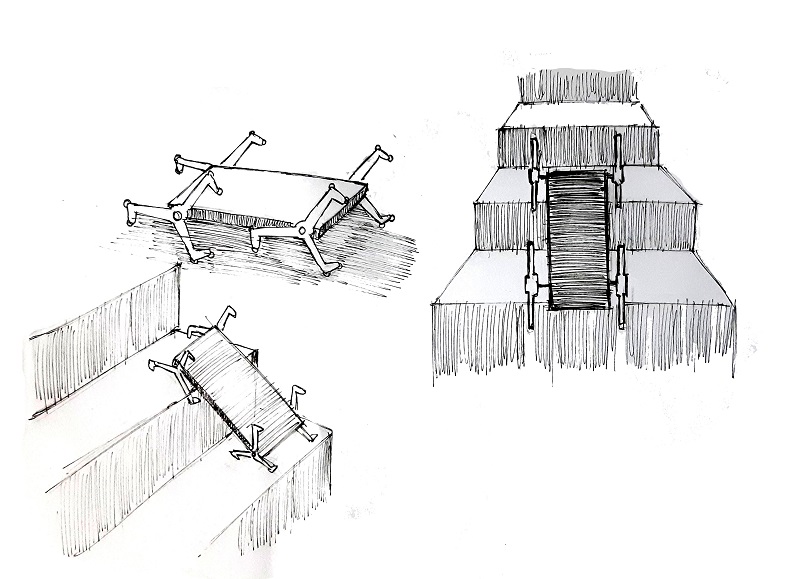
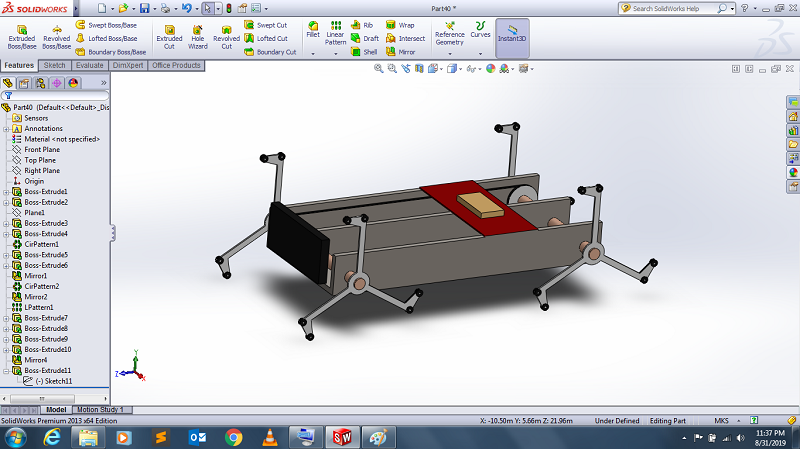
CAD Model :
Purpose and use :
The Stair clibing robot can efficiently climb stairs and on uneven surfaces . This can be used for serach and rescue operations during earthquake & other natural calamities when human life can be in danger. Also if more advancement is done in design like more powerful motors & stroger chasis then this robot can also be used to lift heavy weight and trasporting objects.
Approch :
Our first approach is to find various wheel shapes that can make it easier to clib stairs and uneven surfaces. Then we researched on internet & assibited appropriate resourcses that are required for success of this project.
Challenges :
Our main challage will be -
- to finalise the shape of the wheel.
- to devise a proper mechanism that with minimal error can tread on any surface.
- Make this project with minimum resourses like aurdino, motor etc.
Components to be used :
- 3D printed Wheels
- 313 RPM HD Precision Planetary Gear Motor
- three 24 Tooth, 32 Pitch, 1/4 inch Bore Pinion Gears
- three 72 Tooth, 32 Pitch, 1/2 inch Bore Aluminum Gears
- Aurdino Chip
- The BLE Shield
- The PWM Circuit
- Chain and sproket
- Nut, Bolts, Shafts and other spares
Skills to be used :
We will be making 3D CAD model using solidworks, then getting wheels maunufactures on 3D printers also machining work will be needed on body and finally Aurdino programing needs to be done.
Timeline :
Mid November
-------------------End ----------------------