3-Axis:3-DoF Self Stabilizing Platform
When flying a drone, it's quite essential to maintain the camera stable and avoid any movement due to external elements or when flying it aggressively. However, a drone can also record videos and take pictures while on the ground. This means that to make super steady shots, you need to have a stabilzing platform on-the-go with the drone. However, as per the current technological advances, available options are too heavy and have impacts on the flight time. Thus, we came to a plan to design and create a self-stabilizing platform for the cameras on the drones.
1. Idea: Description & Sketch(es)
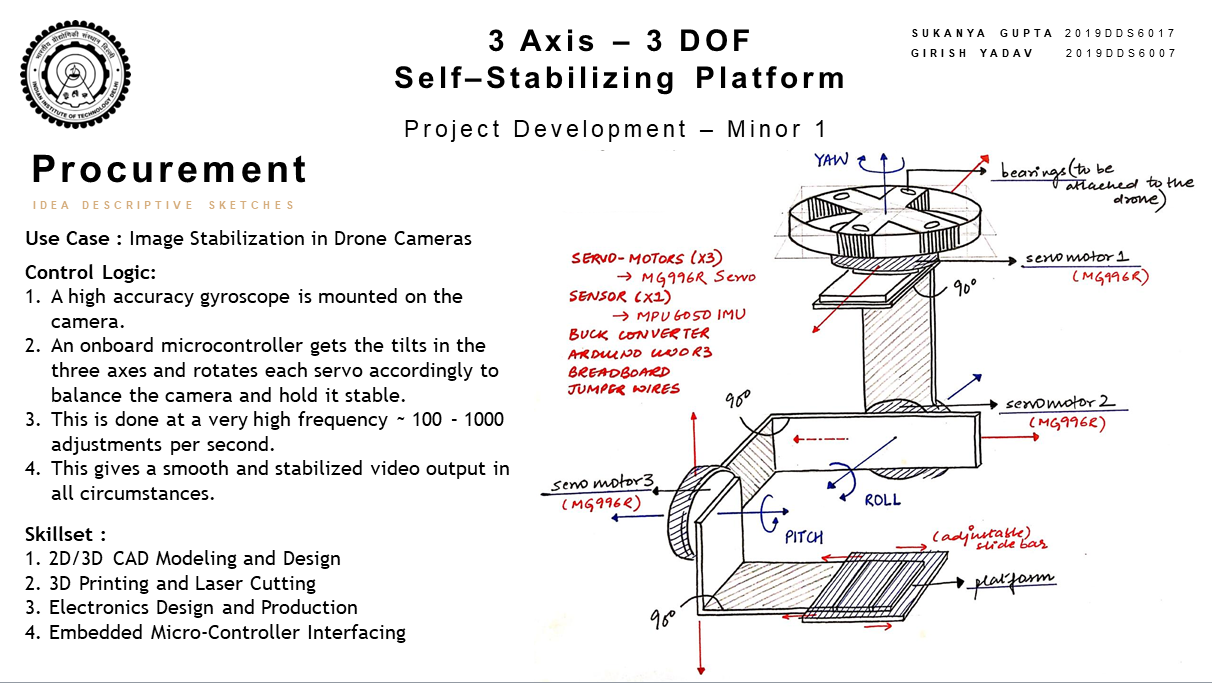
The Self Stabilizing Platform is supposed to work on the principles of Gyroscope
with the three axis set and should be able to accommodate an entity depending upon the torque of the motor such that
the position of the entity shouldn't be affected by the motion of the outer frame, thus making it vibration free.
The centre ring should be vertically fixed with a pivoted support that would
allow rotation of the entity in all the 3 axes. The three-axis self-stabilizing platform would thus allow any
applicable entity mounted on the top of it to remain independent of the rotation of its supporting platform. The
platform would thus dictate the movement of the entity, not the one carrying it and hence it could also act as a
vibrational isolator.
2. Approaches
I would follow Agile Design and Development Strategy for the
conception, construction, and operation of the Self Stabilizing Platform. I would then work modularly and iteratively
for all the three phases of its development.
The Project Idea Approach would comprise of two instructional steps that are:
1. Mechanical Conception & Construction – This will include the designing of the body accommodating all the
circuitry, motors, and more etc. without compromising functionality of the stabilizer.
2. Electrical & Software Operation - This will include the physical circuits and the software code to simulate
gyroscope and accelerometer as and whereever required.
3. Demonstration
4. Challenges
I haven't worked on Electronic Design and Physical Circuitry at an
intermediate level but only as a beginner before and also have a very little idea about Mechanical Design and CAD
Modelling. Hence, this would be a challenge personally. Altogether, understanding and implementation of the
libraries for the sensors like Gyroscope and Accelerometer used will be a confirmed challenge. And the calibration
of motors in the complete product will also create issues in real time application that would need to be looked upon.